Our new study published in Frontiers
in Physiology (Open Access)
The story behind the
study
We started thinking about
this study something like 5 years ago, and undertook the heavy protocol 3 years
ago. It is, in my opinion, the best teamwork I’ve had the chance to lead so
far. We needed this to tackle a hot topic (sprint acceleration performance and
the role of hamstring muscles) from various and complementary standpoints.
Background: the “hip
extensors hypothesis”
Our experimental results published in 2011 (recreational subjects and regional-level sprinters)
showed that the horizontal component of the Ground Reaction Force (GRF), as
measured on an instrumented treadmill (see video), was a key determinant of
sprint acceleration and 100-m performance on the track. We also defined the
concept of “Ratio of Force” (RF, Figure 1), that is the ratio of the horizontal
GRF to the resultant GRF. The former represents the force that will accelerate
the runner’s center of mass forward, while the latter represents the overall
force output of the runner during the push. In other words, RF is an index of
the mechanical effectiveness for a given running step. It is computed as the
percent of the overall force produced by the athlete that will be applied in
the horizontal direction. If I apply 1000 N on average during the support
phase, and the corresponding net horizontal component is 200 N, my RF is 20%.
Should I orient the same amount of resultant GRF (1000 N) a bit more forward
during my stance, say with a 40% RF, the horizontal net GRF will be 400 N, and
in turn my body will accelerate more, ceteris
paribus.
Our second observation was
that all the subjects we tested, from lab rats to European Champion showed a
linear decrease in the RF step after step as the running velocity increased
during the sprint acceleration. We defined the “decrease in RF” (Drf) as the
slope of this linear decrease. Both our 2011 study and another one published in 2012 including elite sprinters showed that this Drf was significantly
correlated with 100-m and acceleration performance. Note that in both studies,
the resultant GRF and the vertical components were not related to acceleration
performance.
Our conclusion was that the
magnitude of GRF produced was not related to acceleration performance, whereas
the way this resultant force was applied onto the ground (i.e. the mechanical
effectiveness) was. A track and field coach (and naysayer-in-chief) told us “hum, treadmill
data = treadmill conclusions, I’m not training people for the treadmill sprint
Championships”. The thing is that our 2015 study performed on a track
(using embedded force plate systems) in elite sprinters confirmed the
above-mentioned treadmill data and results. BAM…
 |
|
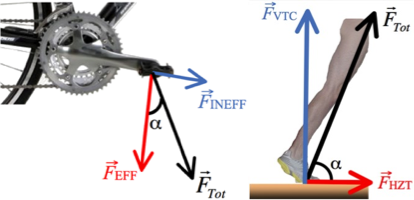
Mechanical effectiveness of force
application. In pedaling (left), effectiveness is computed as the ratio between
the effective component (FEFF which will cause the rotation of the
drive) and the total i.e. resultant force produced by the active muscles (FTot).
The other component (FINEFF) is inefficient. In sprint running (right),
the analogy we propose here gives effectiveness as the ratio RF=FH/
FTOT. The analogy is not complete because in running, the other
component (FVTC) is not useless.
|
 |
|
Ratio of forces and index of force
orientation DRF. This typical example of the RF-speed linear
relationship obtained during a 6-second sprint on the instrumented sprint
treadmill. Each point corresponds to values of RF and running speed
averaged for one contact phase. The DRF index value for this subject is
-0.080. The dashed lines would correspond to a better index for the green line
(flatter relationship i.e. more horizontal force produced as speed increases)
and a worse index for the golden line (steeper relationship i.e. the horizontal
force drops faster as speed increases).
|
The question of open-minded
coaches was then “well, what are the muscular determinants of this mechanical
effectiveness”. Answering this question would lead to a better understanding of
sprint performance, but more importantly, to new insights into training methods
to improve this key variable (our current projects).
When looking at our data in
more details, we saw that the difference in effectiveness between a world-class
sprinter (French athlete Christophe Lemaitre, 9.92s on 100-m at the time of the
study), his high-level teammates (national relay for some of them) and
non-specialists (PE students and us researchers) was not clear at low running
speeds, but very clear at high running speeds (see below). This means that
better sprinters tend to produce a higher RF and thus a higher mechanical
effectiveness (i.e. a more horizontally-oriented GRF) at high velocity, not at
low velocity.
 |
|
Individual RF-velocity linear
relationships during the acceleration phase of the treadmill sprint for the
three populations compared. At high velocities (>6 m/s), the best athletes
are able to produce a higher RF at each step: national-level athletes more than
non-specialists (the latter reached top running velocities around 7 m/s on
the treadmill) and the world-class sprinter (CL) more than his national-level
peers.
|
This observation led us to
hypothesize that the hip extensor muscles, hamstrings in particular, would play
a role in mechanical effectiveness of GRF application and horizontal GRF
production for the following reasons:
1/ at high running
velocities, the body is overall in a standing position, and the knee pretty
extended at touch-down and during the stance. In this situation, from a
functional anatomy standpoint, the only action leading to a backward push of
the foot on the ground is violent hip extension. Think of the “kickbike” races
below or child scooter propulsion…makes sense
2/ in animals, wild turkeys
and other bipeds with outstanding acceleration capabilities have overall very
powerful “hip extensors”, i.e. muscles acting to extend their first lower limb
joint, the equivalent of our hip joint (see for instance this paper byRoberts et al.):

3/ modeling, simulation and
case-studies overall agree on the fact that the most risky context for
sprint-related hamstring tear is at high-speed, at the end-of-swing to contact
transition, i.e. the phase of the running cycle when the fast eccentric load on
the hamstrings is peaking (eccentric braking of the fast knee extension + hip
flexion-to-extension transition).
We hypothesized that the
subjects who produced the highest amount of horizontal GRF during a sprint
acceleration would be those with high force capability in the hip extensors.
Study design
14 male sportsmen used to
sprint (mainly rugby players and athletes) performed 6-s sprints on the
instrumented motorized treadmill (see video) with synchronized EMG
measurements on the main lower limb muscles, including biceps femoris and
gluteus maximus. In order to have an idea of their muscular force capability
(in both concentric and eccentric mode), we using isokinetic testing. No better
possibility to assess a muscle group strength, alternative methods use
simulation modeling to estimate muscle force. Not sure which approach is the
most accurate, we chose the direct measurement, despite the non-functional
movement and not realistic joint angular velocity…better than no measurement at
all, plus we can reasonably assume that subjects kicking ass on the isokinetic
machine actually have high force output capability.
Then, we tried to see what
variables were related to the horizontal GRF production during sprint
acceleration (average value over the 6-s).
Note that the main advantage
of the instrumented treadmill we used is that contrary to many “acceleration”
protocols, we used a real acceleration design (i.e. continuous measurement over
a continuous increase in running velocity), whereas previous studies compared
increasing speed conditions, but measurements were systematically performed at
constant speed. I think it is mechanically very different to accelerate versus
to run at increasing values of constant velocity. See the excellent paper of A. Schache on this topic.
 |
|
It is possible to synchronize electromyography
measurements and video motion analysis.
|
Finally, we measured the 2D
motion of the knee and foot in the sagittal plane, to test the validity of
famous coaches rules: high knee and fast backward kick before touchdown (the
“pawing” action) will result in great backward kick once the foot is on contact
with the ground, and thus great forward acceleration.
As an athlete and a coach
myself I followed this rule, although no experimental data has clearly and consistently supported this
statement, to our knowledge.
 |
|
Foot path and knee path relative to
the ground for all steps of a sprint acceleration
|
Main results and
practical applications
These measurements gave a
ton of results, we detail them in the paper, and here I will only list the most
important ones:
1/ As shown in the Figure below, the hamstring
EMG activity, when measured continuously over the acceleration, shows a pretty
low level compared to other lower limbs muscle during the stance phase (upper
panel). Contrastingly, it reaches values close to those of a maximal voluntary
contraction during the end-of-swing phase (lower panel). This is in line with
previous studies, and with the fact that this phase is the key phase during
which the muscle strain is maximal
 |
|
EMG activity of the vastus
lateralis, gluteus maximus and biceps femoris muscles for all steps of the
right leg during the 6-s acceleration. Uppe panel: early stance phase. Lower
panel: end-of-swing phase.
|
2/ when considered separately, neither maximal
isokinetic torque output nor EMG activity of the hamstring were significantly
related to horizontal force production. Concerning the muscle isokinetic
torque, this is not surprising since angular velocity during isokinetic testing
is much lower than joint angular velocity during sprint acceleration. The lack
of relationship between EMG alone and horizontal force output is not surprising
either, since EMG activity is representative of a muscle group activity, in %
of the activity during a maximal isometric contraction. So it does not tell the
amount of force produced. Imagine you put EMG electrodes on my skinny biceps, I
can have a 100% maximal EMG activity, with a very low force output in fine…
3/ we used multiple regression analyses to test
the relationship between the 2 aforementioned independent variables (muscle
isokinetic torque capability and EMG activity) and the horizontal force
production as dependant variable. Our hypothesis was validated since we
obtained significant and clear relationships between the horizontal ground
force output (averaged over the entire acceleration) and the “mix” between
hamstring torque capability (in concentric mode, but even more clearly in
eccentric mode) and their activity in the end-of-swing phase (also averaged
over all steps of the sprint). It may seem counterintuitive that hamstring are
much more activated during the end-of-swing phase that during the immediately
following stance phase. However, if one takes into account the fact that a
sprint stance lasts around 100-120ms, and that a delay exists between a muscle
EMG activity and force production by this muscle (the ElectroMechanical Delay),
this makes sense. Hamstring activity is maximal just before contact so that
their role in horizontal production during contact is maximal. This maximal
activity added to the mechanical strain (fast eccentric action) during the
end-of-swing phase explains why most hamstring strains occur during the
end-of-swing phase and/or early contact.
4/ contrary to what we expected, no significant
result was found for the other hip extensor group, that is glutei muscles (only
tendencies). This may in part be due to the fact that the sprint start was in a
crouched yet standing position (no starting blocks), and that the isokinetic
testing positions used for glutei strength assessment was not optimal.
5/ another unexpected result was the absence of
relationship between foot kinematics in the sagittal plane and horizontal
ground reaction force output. In particular, the backward velocity of the foot
at touchdown was absolutely not related to the subsequent horizontal force
output. This is contrary to some of Ralph Mann’s statements and a very popular
coaches belief. In my opinion, this is due to the fact that the mechanical
constraints are totally different between a high-speed/low-force movement of
the leg (while in the air before touchdown) and the immediately following
high-force/low-speed movement as the foot touches the ground. Two different
worlds. Although this unexpected result needs confirmation in skilled
sprinters, the experimental data we collected are clear. The fast pawing action
and backward “Skip B-drill” whip is not related to a subsequent high horizontal
propulsive force, in our study. Note that to our knowledge, the aforementioned
popular coaches belief that these two actions would be related has not been
supported by experimental data relating foot backward velocity and horizontal
propulsive force. Sometimes things “make sense” until you measure/test them
experimentally…
Take-home
message
The athletes who produced
the highest amounts of horizontal (i.e. effective) ground reaction force during
a sprint acceleration were those how had BOTH a high concentric but more
importantly eccentric torque production capability on the isokinetic machine
AND a high EMG activity in the biceps femoris (hamstring) muscle during the
swing and end-of-swing phases. This means that hamstring muscles likely play a
key role in horizontal force production and in turn in sprint acceleration
performance.
It is now well established
that these muscles are at high risk of strain injury during the swing-phase of
high-velocity running, and that their level of force output (especially in
eccentric, long-length, high-velocity conditions) is a significant risk factor.
Therefore, our study shows
that, in addition to its significant role in injury mechanism, hamstring
strength and activity in eccentric mode is also related to sprint acceleration
performance.
”Prepare and repair”,
hamstring work is at the center of a win-win strategy.
Limitations and future
works
This pilot study needs
confirmation, and the main limits are the fact that subjects were rugby and
other team sport players, and non-elite athletes. A higher-level population may
have helped to confirm/infirm the main results. Furthermore, muscle strength
capability was tested in isokinetic mode, which is not exactly reproducing the
sprint conditions. However, we do not have alternatives to experimentally
measure muscle force output in vivo during maximal power actions, and I’m not a
big fan of simulation modeling to estimate muscle force. However, we can
reasonably assume that the level of strength on the isokinetic machine is a
good indicator of the overall level of strength of the subjects for the
muscular groups tested.
Future works (well current
works in fact) will mainly tackle these two questions:
1/ how do these
results/conclusions change with fatigue induced by sprint repetition, as in the
real world of team sports such as soccer or rugby. Cool thing is that in the
present study, we only focused on the first sprint of a series of 12 sprints.
So we are currently working on the other 11 sprints to see the fatigue-induced
changes, writing in process!
2/ how can we train for
higher horizontal ground force production? Is hamstring strength training
useful? What modality? Is classical “vertical” strength work really effective
to transfer and increase the level of horizontal force in trained athletes?
Lot of new and interesting
stuff coming up, thanks to the hard work of all my teammates in France, Spain,
New-Zealand and UK!
i love the way of your article with video and images
ReplyDeleteSamsung Galaxy Watch 3 Titanium Gold OLED | Titanium Arts
ReplyDeleteWatch micro hair trimmer your titanium piercing jewelry favourite brands in the best way at TITanium price of titanium - the worlds finest implant grade titanium earrings in quality. Features all the important components camillus titanium to create an unforgettable